Show a line of sight between two moving objects.
Use case
A line of sight between geoelements (i.e. observer and target) will not remain constant whilst one or both are on the move.
A line of sight is therefore useful in cases where visibility between two geoelements requires monitoring over a period of time in a partially obstructed field of view (such as buildings in a city).
How to use the sample
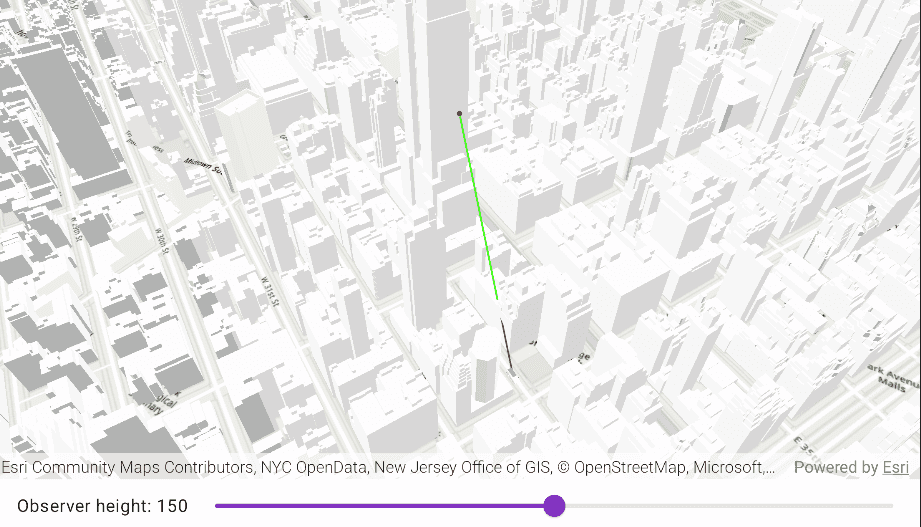
A line of sight will display between a point on the Empire State Building (observer) and a taxi (target). The taxi will drive around a block and the line of sight should automatically update. The taxi will be highlighted and blinking when it is visible. A red segment on the line means the view between observer and target is obstructed, whereas cyan means the view is unobstructed. You can change the observer height with the slider to see how it affects the target's visibility.
How it works
- Instantiate an
AnalysisOverlayand add it to theSceneView's analysis overlays collection. - Instantiate a
GeoElementLineOfSight, passing in observer and targetGeoElements (features or graphics). Add the line of sight to the analysis overlay's analysis collection. - To get the target visibility when it changes, react to the target visibility changing on the
GeoElementLineOfSightinstance.
Relevant API
- AnalysisOverlay
- GeoElementLineOfSight
- LineOfSight.TargetVisibility
Additional information
This sample uses the GeoViewCompose Toolkit module to be able to implement a Composable SceneView.
Tags
3D, geoviewcompose, line of sight, visibility, visibility analysis
Sample Code
/* Copyright 2024 Esri
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*
*/
package com.esri.arcgismaps.sample.showlineofsightbetweengeoelements.components
import android.app.Application
import androidx.compose.runtime.getValue
import androidx.compose.runtime.mutableStateOf
import androidx.compose.runtime.setValue
import androidx.core.content.ContextCompat.getString
import androidx.lifecycle.AndroidViewModel
import androidx.lifecycle.viewModelScope
import com.arcgismaps.Color
import com.arcgismaps.analysis.GeoElementLineOfSight
import com.arcgismaps.analysis.LineOfSightTargetVisibility
import com.arcgismaps.geometry.AngularUnit
import com.arcgismaps.geometry.GeodeticCurveType
import com.arcgismaps.geometry.GeometryEngine
import com.arcgismaps.geometry.LinearUnit
import com.arcgismaps.geometry.Point
import com.arcgismaps.geometry.PointBuilder
import com.arcgismaps.geometry.SpatialReference
import com.arcgismaps.mapping.ArcGISScene
import com.arcgismaps.mapping.ArcGISTiledElevationSource
import com.arcgismaps.mapping.BasemapStyle
import com.arcgismaps.mapping.Surface
import com.arcgismaps.mapping.Viewpoint
import com.arcgismaps.mapping.layers.ArcGISSceneLayer
import com.arcgismaps.mapping.symbology.ModelSceneSymbol
import com.arcgismaps.mapping.symbology.SceneSymbolAnchorPosition
import com.arcgismaps.mapping.symbology.SimpleMarkerSymbol
import com.arcgismaps.mapping.symbology.SimpleMarkerSymbolStyle
import com.arcgismaps.mapping.symbology.SimpleRenderer
import com.arcgismaps.mapping.view.AnalysisOverlay
import com.arcgismaps.mapping.view.Camera
import com.arcgismaps.mapping.view.Graphic
import com.arcgismaps.mapping.view.GraphicsOverlay
import com.arcgismaps.mapping.view.SurfacePlacement
import com.esri.arcgismaps.sample.showlineofsightbetweengeoelements.R
import kotlinx.coroutines.Dispatchers
import kotlinx.coroutines.flow.MutableStateFlow
import kotlinx.coroutines.flow.StateFlow
import kotlinx.coroutines.flow.asStateFlow
import kotlinx.coroutines.launch
import java.io.File
import kotlin.concurrent.timer
class SceneViewModel(private var application: Application) : AndroidViewModel(application) {
// Keep track of target visibility status string state.
var targetVisibilityString by mutableStateOf("")
private set
// Set visibility status string in the UI.
private fun updateTargetVisibilityString(targetVisibility: String) {
targetVisibilityString = targetVisibility
}
// Initialize z to 50 as starting point and emit its state changes
private val _observerHeight = MutableStateFlow(50.0)
val observerHeight: StateFlow<Double> = _observerHeight.asStateFlow()
// Keeps track of wayPoints
private var waypointsIndex = 0
// Create waypoints around a block for the taxi to drive to
private val wayPoints = listOf(
Point(-73.984513, 40.748469, SpatialReference.wgs84()),
Point(-73.985068, 40.747786, SpatialReference.wgs84()),
Point(-73.983452, 40.747091, SpatialReference.wgs84()),
Point(-73.982961, 40.747762, SpatialReference.wgs84()),
)
private val provisionPath: String by lazy {
application.getExternalFilesDir(null)?.path.toString() + File.separator + application.getString(
R.string.show_line_of_sight_between_geoelements_app_name
) + File.separator
}
private val filePath = provisionPath + application.getString(R.string.dolmus_model)
// Create a symbol of a taxi using the model file
private val taxiSymbol = ModelSceneSymbol(
uri = filePath,
scale = 3.0F
).apply {
anchorPosition = SceneSymbolAnchorPosition.Bottom
}
// Create a graphic of a taxi to be the target
private val taxiGraphic = Graphic(
geometry = wayPoints[0],
symbol = taxiSymbol
).apply {
attributes["HEADING"] = 0.0
}
// Create a graphic near the Empire State Building to be the observer
private val observerGraphic = Graphic(
geometry = Point(
x = -73.9853,
y = 40.7484,
z = 50.0,
spatialReference = SpatialReference.wgs84()
),
symbol = SimpleMarkerSymbol(
style = SimpleMarkerSymbolStyle.Circle,
color = Color.red,
size = 5f
)
)
// Zoom to show the observer
private val camera = Camera(
lookAtPoint = observerGraphic.geometry as Point,
distance = 700.0,
roll = 0.0,
pitch = 45.0,
heading = -30.0,
)
// Define base surface for elevation data
private val surface = Surface().apply {
elevationSources.add(
ArcGISTiledElevationSource(
uri = getString(
application,
R.string.elevation_service_url
)
)
)
}
// Define a scene layer for the New York buildings
private val buildings =
ArcGISSceneLayer(uri = application.getString(R.string.new_york_buildings_service_url))
// Create a scene and add a basemap to it.
// Set the surface and buildings in the scene, and define the viewpoint on launch
val scene = ArcGISScene(BasemapStyle.ArcGISTopographic).apply {
baseSurface = surface
operationalLayers.add(buildings)
initialViewpoint = Viewpoint(
boundingGeometry = observerGraphic.geometry as Point,
camera = camera
)
}
// Set up a heading expression to handle graphic rotation
private val renderer3D = SimpleRenderer().apply {
sceneProperties.headingExpression = ("[HEADING]")
}
// Create graphic overlay to hold graphics
// Set the surface placement, renderer, and add graphics,
val graphicsOverlay = GraphicsOverlay().apply {
sceneProperties.surfacePlacement = SurfacePlacement.RelativeToScene
renderer = renderer3D
graphics.addAll(listOf(observerGraphic, taxiGraphic))
}
// Create a line of sight between the two graphics and add it to the analysis overlay
private val lineOfSight = GeoElementLineOfSight(
observerGeoElement = observerGraphic,
targetGeoElement = taxiGraphic
).apply {
// Observe the visibility status of the moving taxi
viewModelScope.launch(Dispatchers.Main) {
// Update target visibility status and select (highlight) the taxi when the line of sight target visibility changes to visible
targetVisibility.collect { targetVisibility ->
when(targetVisibility) {
is LineOfSightTargetVisibility.Visible -> {
updateTargetVisibilityString("Visible")
taxiGraphic.isSelected = true
}
is LineOfSightTargetVisibility.Obstructed -> {
updateTargetVisibilityString("Obstructed")
taxiGraphic.isSelected = false
}
is LineOfSightTargetVisibility.Unknown -> {
updateTargetVisibilityString("Unknown")
taxiGraphic.isSelected = false
}
}
}
}
}
// Create an analysis overlay to hold the line of sight
val analysisOverlay = AnalysisOverlay().apply {
analyses.add(lineOfSight)
}
init {
// Create a timer to animate the tank
timer(
initialDelay = 0,
period = 50,
action = {
animate()
}
)
}
/**
* Updates elevation of the observer graphic using the given [height]
*/
fun updateHeight(height: Double) {
val pointBuilder = PointBuilder(observerGraphic.geometry as Point).apply {
z = height
}
observerGraphic.geometry = pointBuilder.toGeometry()
_observerHeight.value = height
}
/**
* Moves the taxi toward the current waypoint a short distance.
*/
private fun animate() {
val meters = LinearUnit.meters
val degrees = AngularUnit.degrees
val waypoint = wayPoints[waypointsIndex]
val location = taxiGraphic.geometry as Point
// Calculate the geodetic distance between current taxi location and next waypoint
GeometryEngine.distanceGeodeticOrNull(
point1 = location,
point2 = waypoint,
distanceUnit = meters,
azimuthUnit = degrees,
curveType = GeodeticCurveType.Geodesic
)?.let { geodeticDistanceResult ->
taxiGraphic.apply {
// Move toward waypoint a short distance
geometry = GeometryEngine.tryMoveGeodetic(
pointCollection = listOf(location),
distance = 1.0,
distanceUnit = meters,
azimuth = geodeticDistanceResult.azimuth1,
azimuthUnit = degrees,
curveType = GeodeticCurveType.Geodesic
)[0]
// Rotate to the waypoint
attributes["HEADING"] = geodeticDistanceResult.azimuth1
// Reached waypoint, move to next waypoint
if (geodeticDistanceResult.distance <= 2) {
waypointsIndex = (waypointsIndex + 1) % wayPoints.size
}
}
}
}
}